学生姓名:卞浩臣
班班级级:机械2020-01班
指导教师:吴文海
毕设题目:地铁轨枕更换液压机械臂系统设计


一、概况
1.选题意义
地铁联络线轨枕需要定期进行维护与更换,在隧道有限空间内,多种维护机械设备同时进行作业给维护工作带来诸多不便问题。该项目为在轨道车辆上加装一套集成化轨枕更换液压机械臂系统,在作业时可以完成轨枕的存放、更换及运输,停止作业时该设备可以折叠成较小的模块(设备限界以内),方便设备的运输与管理。该设备的成功研发有助于保障地铁的安全运行。
2.任务分解
(1) 查询文献,了解轨枕更换设备的国内外现状; (2) 轨枕更换液压机械臂系统的工作原理和技术路线分析; (3) 轨枕更换液压机械臂系统总体方案设计、参数计算; (4) 机械结构的设计,二维图绘制,液压执行机构的计算和选型; (5) 撰写毕业设计论文。
二、已完成工作
(1) 机械臂整体结构设计,运行方式模拟
根据工况确定机械臂将使用三臂结构,基座使用液压马达控制旋转,末端机械手由液压马达控制旋转,液压缸控制夹取。
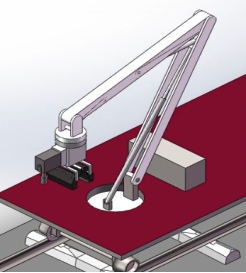
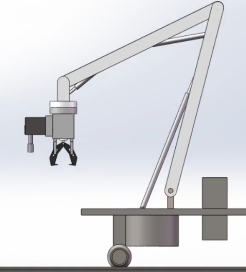
(a)机械臂结构 (b)机械臂侧视图
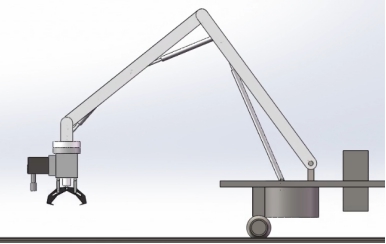
(c)机械臂运动模拟
图1. 机械臂结构及运动模拟
机械臂的工作方式为:控制者依次手动控制机械臂基座液压马达和三个控制手臂旋转的液压缸,使手臂末端旋至需要更换的轨枕上方;控制者控制夹爪处液压缸推出的同时机械臂下降;抓取轨枕后通过机械臂液压缸的前后推动使得马达轨枕与道床的接触松动;之后控制机械臂从另一侧抽出轨枕完成拆卸。装入的方式与拆卸相同。
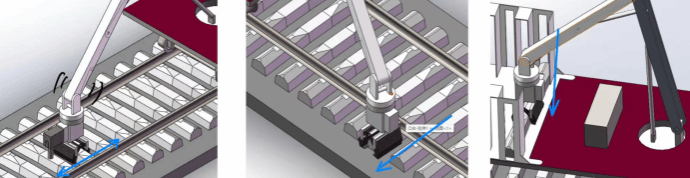
(a)松动 (b)抽出 (c)装载
图2. 机械臂工作方式
(2) 传动路线设计,机构选型
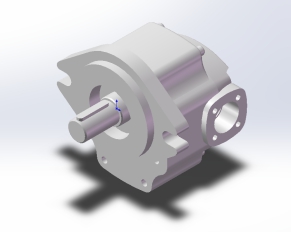
液压机械臂基座采用与挖掘机底盘类似的传动方式。由液压马达带动,连接一谐波减速器,带动由回转支承机构连接机箱的机械臂旋转台面。
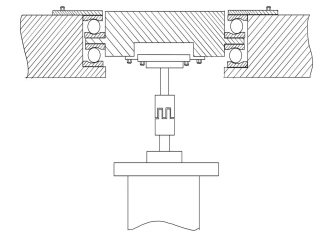
图3. 机械臂基座传动路线
液压臂的传动方式为液压杆推动,三臂均由其所对应的液压缸驱动,使用运动解算控制液压缸给油的速度。末端执行器的驱动方式与基座类似。
关于道床与轨枕之间的摩擦力查询文献可知若以二型轨枕为例,其大致的值为15.8kN。
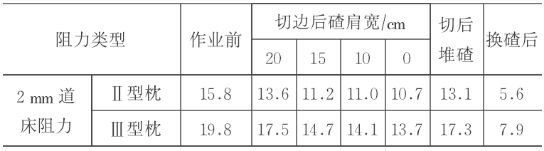
表1. 切边前后道床纵向阻力比较
根据这一值进行强度计算以及选型,结果为基座液压马达选用GM5-8型齿轮马达,满足提供整机旋转所需转矩的需求,末端执行器液压马达选用规格107的A6V型斜轴式液压变量柱塞马达,液压油缸选用HSG型液压油缸,谐波减速器基座的型号选用较大的50型160减速比减速器,机械手部分选用40型50减速比减速器。
根据这一值进行强度计算以及选型,结果为基座液压马达选用GM5-8型齿轮马达,满足提供整机旋转所需转矩的需求,末端执行器液压马达选用规格107的A6V型斜轴式液压变量柱塞马达,液压油缸选用HSG型液压油缸,谐波减速器基座的型号选用较大的50型160减速比减速器,机械手部分选用40型50减速比减速器。
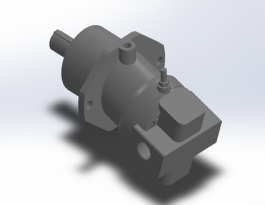
(a)谐波减速器 (b) A6V型液压马达
(c) GM5系列马达
图4. 部分机构选型及其对应模型
(1) 机械臂臂长计算
为满足机械臂在不工作时能够收起成一个较小的机构的需求,机械臂的臂长须尽可能短,同时又应保证其在伸长时能够抓取靠后部的铁道上的轨枕以及列车上对方的轨枕,同时保证不与车上先前已放置好的轨枕发生碰撞。根据这一需求进行运动点位的计算。
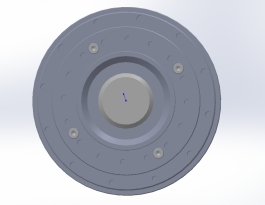
首先设计轨枕的堆放架如图,则可满足其堆放稳定的要求,且位置精确。
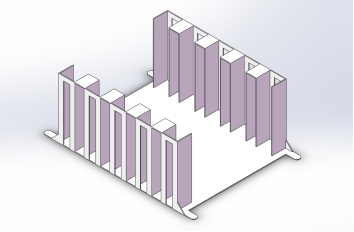
图5. 轨枕堆置架
因为本装置只用作抢修,不作为大规模更换的手段,所要更换的不多,则更换与堆放用如下方式进行:
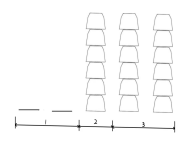

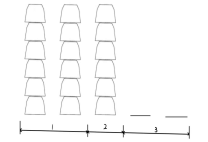
(a)新轨枕等待更换 (b)抓取新的更换旧的 (c)全部装载旧轨枕
图6. 轨枕堆放方式示意
之后即可对机械手所要达到的工位进行计算,根据其堆放以及夹取的方式,再加上误差补偿,计算出机械臂六个极限工位。
之后即可对机械手所要达到的工位进行计算,根据其堆放以及夹取的方式,再加上误差补偿,计算出机械臂六个极限工位。
(a)轨枕堆放坐标系建立 (b)机械臂坐标系建立
(c)板车方向机械臂的极限工位 (d)轨道方向的机械臂极限工位
图7. 坐标系建立以及极限工位的计算
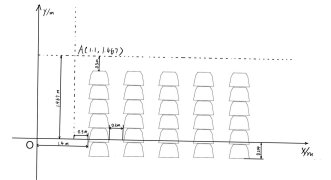
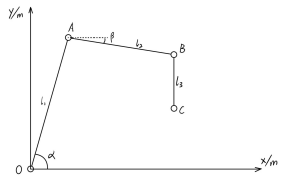
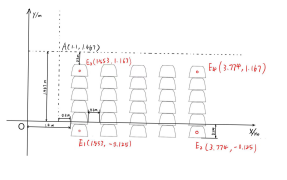
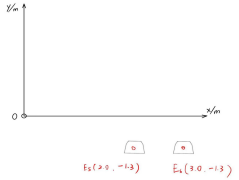
令α大于0度,β小于0度,三段手臂的臂长尽量小。机械手需要到达6个极限工位,分别为(1.553,1.167)、(1.553,-0.125)、(3.774,1.167)、(3.774,-0.125)、(2,-1.3)、(3,-1.3)。
编写python程序,计算三个臂的臂长的可选范围,并给出最优的臂长搭配方案。首先定义一个函数calculate_reachable_lengths来计算每个工位点的可达臂长范围。然后,find_optimal_arm_lengths函数遍历所有工位点,找到满足所有工位点的最小和臂长。最后,程序输出最优的臂长搭配方案。
定义一个is_reachable函数,该函数检查给定的工位点是否在给定的臂长和角度限制下可达。然后,find_optimal_arm_lengths函数使用逐步增加臂长的方法,从较小的初始臂长开始,逐步增加直到找到一组能够满足所有工位点的臂长组合。
根据对应工位的工作角度做出力学分析,并最终确定液压缸的型号。
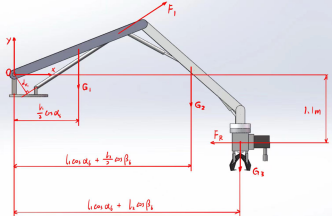
图8. 第6极限工位首段机械臂受力分析
二、下一步工作计划
1. 完成剩余模型装配
2. 绘制非标件图纸
3. 液压控制回路设计
4. 准备结题答辩

问题一:使用概念模型如何进行选型计算?
回答:再校核时对于较不明确的数据如机械臂的整体重量采用的是概念模型加载材料后的质量,在其基础上设置了较高的安全系数以避免选型误差。其次,机械臂需满足轻量化的设计要求,机械臂的结构将做出改善且臂长将比概念模型的更短,故理论上选型不会有问题。
问题二:能否描述你的机械臂的整体结构?
回答:是三臂机械臂的结构。机械臂使用液压杆驱动,旋转使用液压马达驱动。

在毕业设计的过程中,我对做科研的方式有了更进一步的了解。从最开始的行业现状的查询,到之后的总体方案设计,以及机械结构设计,我从毕设中查漏补缺,弥补了本科课程中未能完全掌握或接触的内容。机械臂的设计所包含的方面远比我想象的要多,所需要的知识也涵盖了包括电控、液压控制和机械设计等方面。借着这个课题,我也见识了上课并不会接触到的现实中的液压系统设计。从书本上的液压元件符号到现实中的泵、马达等,这一过程是困难的,现实的油路并不是一根线,而是一根需要考虑管径,考虑材质的实打实的液压油通路。
在整个设计的过程中,我认识到自己对机械的认识还是冰山一角。就算借助于机械设计手册也不能完全的找到所需机构最优的设计。之后的学习中我会更加重视机械设计经验的累积,争取能够更加熟练准确地完成设计工作。

