学生姓名:张迪
班级班级:测控2020-01班
指导教师:李艳萍
毕设题目:机载对地观测用运动测量系统最优飞行轨迹设计


一、概况
1.选题意义
机载对地观测系统是以飞机为观测平台,利用成像载荷(如合成孔径雷达、光学相机等)获取地球表面与表层大范围、高精度、多层次空间信息的一种尖端综合性技术。对地观测系统实现高精度成像要求载机保持理想运动——匀速直线运动。由于气流扰动和飞行控制误差等因素的影响,载机实际运动轨迹必然偏离理想运动轨迹,由此产生的运动误差将导致成像质量下降。因此,要实现高精度成像,必须对载机的运动误差进行补偿,而补偿的前提是载机运动参数的高精度测量。
惯性/卫星组合测量系统是目前测量载机运动参数的有效手段。由于没有直接姿态观测信息,当载机长时间匀速直线飞行时,组合测量系统的姿态误差可观测度较低,导致姿态测量误差缓慢积累。必须根据成像测区进行飞行轨迹设计,通过载机有目的的、适当的机动动作,来提高运动参数的估计精度,从而满足对地观测成像的需要。针对上述需求,本论文开展了机载对地观测用运动测量系统最优飞行轨迹设计研究,完成多种飞行轨迹的设计与参数设置,为机载对地观测工程应用合理规划飞行轨迹提供理论指导。
2.任务分解
(1)学习惯性导航相关理论知识,掌握惯性导航基本原理,实现惯性导航解算算法。
(2)学习并掌握组合导航的基本原理,建立组合导航的误差模型,设计并实现基于卡尔曼滤波的惯性/卫星组合解算算法。
(3)熟练使用轨迹发生器,生成不同机动方式下的飞行轨迹数据,为纯惯性导航解算、惯性/卫星组合解算提供输入数据(陀螺仪、加速度计和卫星导航系统位置、速度测量数据)和基准数据(无误差的位置、速度和姿态运动参数)。
(4)基于轨迹发生器生成的数据,对纯惯性导航解算算法和基于卡尔曼滤波的惯性/卫星组合解算算法进行调试与仿真验证。
(5)对不同机动方式下惯性/卫星组合解算估计误差进行对比分析,并对机动强度、组合滤波估计稳定时长、直线飞行时长等轨迹参数进行测试和优化。
(6)在仿真验证与结果分析的基础上,得出结论,撰写论文。
二、已完成工作
1、学习惯性导航相关理论知识
(1)掌握常用坐标系的定义
(2)掌握坐标系间相互变换的表示方法
(3)掌握惯性导航的基本原理
2、设计并实现惯性导航解算算法
(1)惯性导航算法流程图
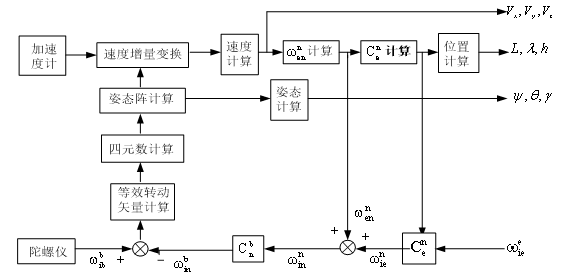
图1 惯性导航解算流程
(2)静态导航仿真结果与分析
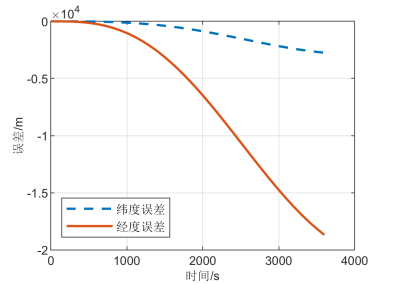
图2 静态导航位置误差仿真结果图
结果分析:图2中数据是将经度误差与地球半径相乘,转换成单位为m的东向位置误差;同理将纬度误差转换成单位为m的北向位置误差。静态导航仿真1小时后,末点位置误差约为 ,与理论相符,可验证惯导解算算法的正确性,同时由图2也可看出,惯性导航解算具有发散性,需要引入组合导航以获得更高的精度。
,与理论相符,可验证惯导解算算法的正确性,同时由图2也可看出,惯性导航解算具有发散性,需要引入组合导航以获得更高的精度。
3、学习并掌握组合导航的基本原理
(1)建立组合导航误差模型
(2)建立基于卡尔曼滤波的 SINS/GNSS组合导航滤波模型
4、设计并实现基于卡尔曼滤波的惯性/卫星组合解算算法
(1)组合导航算法流程图
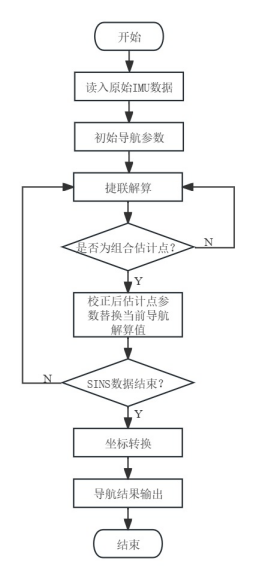
图3 基于卡尔曼滤波的组合导航数据处理流程图
(2)组合导航算法仿真结果与分析
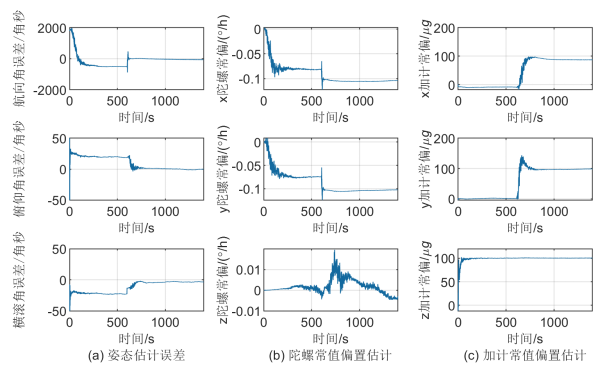
图4 组合滤波结果
结果分析:图4(b)、(c)的陀螺常值漂移和加计常值偏置估计曲线表明,机动拐弯前,两个水平陀螺常值漂移 、
、 仅得到部分估计,水平加计常值偏置
仅得到部分估计,水平加计常值偏置 、无法估计;机动拐弯后,、、、的估计精度均得到显著提高,接近理论值。惯性器件误差估计精度的提高,有效改善了方位角和两个水平姿态角的估计精度,如图(a)所示。以上结论与机动拐弯能够提高姿态误差的可观测度,进而提高姿态误差估计精度的可观测性分析结果相符。
、无法估计;机动拐弯后,、、、的估计精度均得到显著提高,接近理论值。惯性器件误差估计精度的提高,有效改善了方位角和两个水平姿态角的估计精度,如图(a)所示。以上结论与机动拐弯能够提高姿态误差的可观测度,进而提高姿态误差估计精度的可观测性分析结果相符。
5、对不同机动方式下惯性/卫星组合解算估计误差进行对比分析
(1)使用轨迹发生器生成不同机动方式下的飞行轨迹
图5 4种机动方式下飞行轨迹图
(2)不同机动方式下运动参数估计精度结果与分析
图6 无机动、S型、O型、8字型机动情况下姿态误差
表 1 不同机动方式下成像段姿态误差统计
姿态误差RMS | 无机动 | S型 | O型 | 8字型 |
航向角 | 0.1239 | 0.0023 | 0.003 | 0.0025 |
俯仰角 | 0.0038 | 0.00037 | 0.00033 | 0.00028 |
横滚角 | 0.0104 | 0.00095 | 0.001 | 0.00082 |
姿态误差STD | 无机动 | S型 | O型 | 8字型 |
航向角 | 0.1067 | 0.00048 | 0.0018 | 0.00041 |
俯仰角 | 0.0032 | 0.00022 | 0.00025 | 0.00026 |
横滚角 | 0.0101 | 0.00061 | 0.00045 | 0.00067 |
结果分析:从图6和表1可以看出,相比于无机动直接进入测区段飞行相比,3种机动方式均提高了航向角的估计精度,S型机动和8字机动的航向角误差估计速度相近,其中8字型机动估计效果较好,3种机动方式对俯仰角和横滚角的估计误差和估计速度相差较小。
三、下一步工作计划
1.对不同机动方式下惯性/卫星组合解算估计误差进行对比分析,并对机动强度、组合滤波估计稳定时长、直线飞行时长等轨迹参数进行测试和优化。
2.算法的调试与优化。
3.在仿真验证与结果分析的基础上,得出结论,撰写论文。

问题一:仿真数据是使用轨迹发生器生成,如何验证轨迹发生器生成的数据与跟实际情况一致?
回答:在不叠加任何误差的情况下利用轨迹发生器生成的陀螺仪与加速度计数据进行惯导解算,解算出来的轨迹与设定轨迹一致,可验证轨迹发生器所生成的数据是可靠的。
问题二:评价轨迹优劣的指标是什么?
回答:根据不同轨迹下,组合导航解算出来的姿态误差的标准差来比较轨迹优劣。

刚拿到选题时有些不知道该从何下手,后来在指导老师们的规划和带领下,一步步从姿态解算基础,到惯性导航算法,再到组合导航算法,慢慢搭建起了自己的知识框架,也算比较顺利地走到了最后的轨迹设计与对比分析这一步。回顾整个过程,收获体会主要有三点:第一,用到什么学什么,刚接触一个新的知识时,用到什么就学什么,效率高而且记忆深刻;第二,要讲求逻辑,通过毕业设计发现了自己的逻辑确实不太行,做事很难梳理出一个大框架,需要改进;第三,注意细节,在撰写中期报告时我出了很多问题,小到字号不统一,大到配图出错,现在的体会就是,细节做不好就一定会犯更大的错误。
最后,希望自己在接下来这段时间里认真、严谨地完成自己的毕业设计。

