学生姓名:贺宇轩
班 级:测控2019-02班
指导教师:王雪梅
毕设题目:基于线结构光的轴类零件圆柱度测量系统设计


一、概况
1.选题意义
轴类零件是高端装备的必要组成部件,其尺寸精度、形状和位置精度直接影响零件的安装、配合和定位性能,继而影响整个高端设备旋转件的回转精度、震动性能及使用寿命。
圆柱度是评定轴类零件形状精度的重要指标之一。目前,圆柱度测量方法以接触式测量为主,如圆柱度仪、三坐标测量机等,都是采用表头或测头与被测零件表面直接接触,按照一定轨迹逐点进行测量,不仅测量效率较低,而且对测量环境要求较高,多用于实验室测量,不适用于车间现场在线测量。
结构光视觉测量技术是一种非接触式光学图像测量技术,具有测量视场大、测量精度高、测量速度快和适合在线自动测量等优点,能够较好解决传统测量技术的不足之处。
基于此,本毕业设计基于线结构光技术,分析轴类零件圆柱度测量和评定方法,并建立系统,既能提高测量效率,还能保证测量精度,对于轴类零件加工技术也具有一定指导意义,这正是本研究选题的意义所在。
2.任务分解
1) 根据设计要求进行相机和光源选型,搭建结构光视觉测量系统。
2) 对视觉测量系统进行标定,包括相机标定、光平面标定和旋转轴标定。
3) 研究线结构光中心条纹提取算法并编写程序。
4) 分析比较各种圆柱度评定算法并编写程序。
5) 整个系统的联调和测量精度分析对比。
二、已完成工作
1.硬件选型与实验平台搭建
相机选用CMOS相机,分辨率为40963072,数据结构为USB模式,可直插电脑以获取图像。镜头型号选择MVL-KF2528M-12MPE,焦距为25mm,畸变控制在0.1%以内,可手动调节光圈和聚焦,以获得更清晰的棋盘格及光条纹图像;线激光光源选型为AJHC5660200L30,输出功率为50mW,可以得到足够亮度的光条纹,可调焦控制光线粗细。由以上选用硬件,搭建实验平台如图1所示。
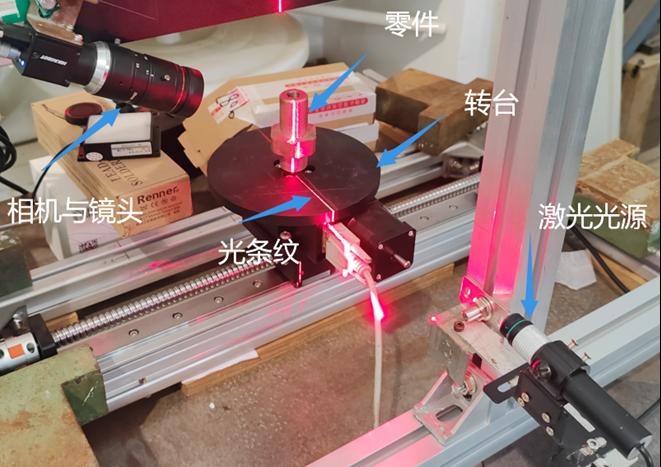
图 1 线结构光测量实验平台
2.线激光条纹中心线提取算法及编程
在线结构光视觉测量中,由线激光器发射出的线结构光,在本质上为一个连续且具有一定厚度的空间光平面,在该空间光平面的厚度方向上,光强近似服从高斯分布。 光条中心线的提取任务就是要找到图像中的光条灰度的高斯分布中心。目前对三种光条纹中心提取算法进行了编程,分别为骨架提取法、灰度重心法和Steger算法,提取效果如图2所示。考虑到效果以及程序运行速度,最后选择了灰度重心法进行中心条纹的提取。

(a)骨架提取法
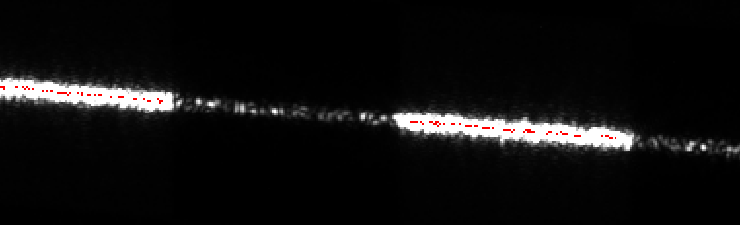
(b)Steger算法
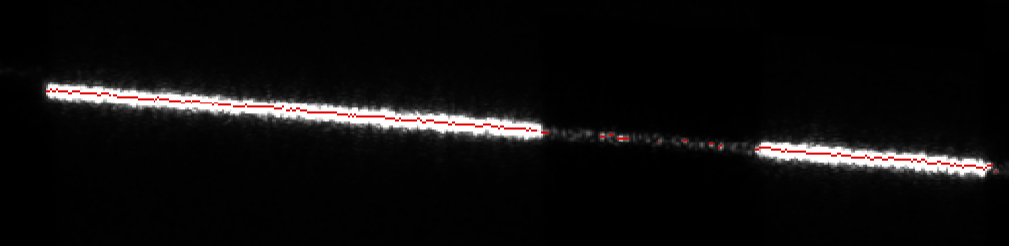
(c)灰度中心法
图 2 线激光条纹中心线提取效果图
3.测量系统的标定
相机标定采用张正友标定法,可求出相机内部参数,即像素坐标到相机坐标系的转换矩阵;光平面标定通过多组拍摄激光照射在棋盘格上的图片,求出线激光光源产生的光线平面在相机坐标系下参数,结果如图3所示,其中红色为光条纹点集,蓝色为拟合的光平面;旋转轴标定同样通过拍摄多组棋盘格绕转台旋转的图片,通过拟合圆心以及最小二乘法求出转台的旋转轴在相机坐标系下的直线方程,结果如图4所示,图中蓝色点为棋盘格内角点,红色点为拟合的圆心。
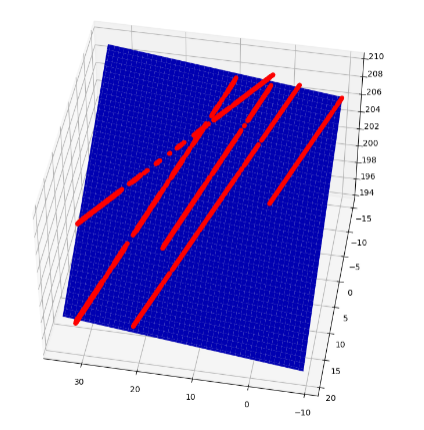
图 3 光平面标定结果
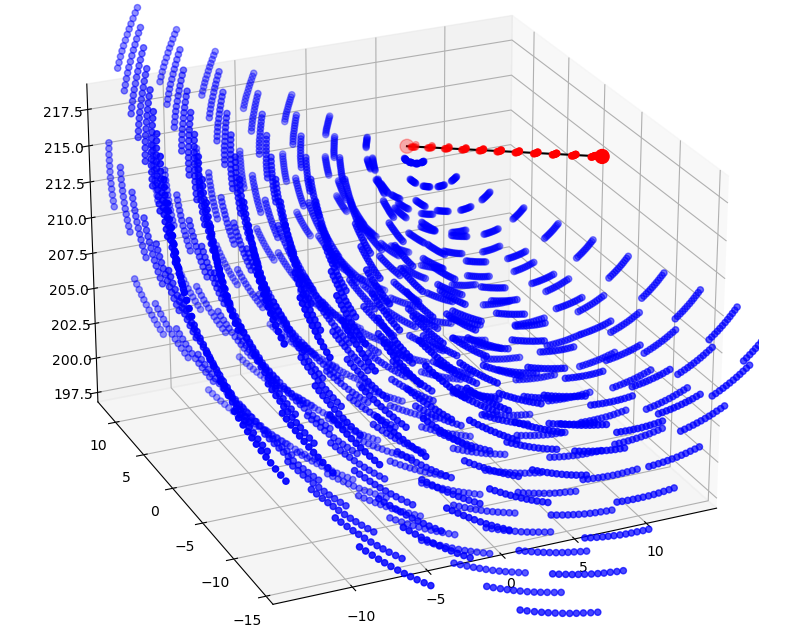
图 4 旋转轴标定结果
4.三维重建
通过实验获取照片数据时,转台每转动1度,控制相机拍一张零件的图像,总共拍摄360张图片。通过上述标定结果参数将每张图片的光条纹通过矩阵变换绕旋转轴旋转对应角度,实现了零件的三维重建,图5为被测零件实物照片,图6为线结构光测量三维重建点云图。

图 5 零件

图 6 重建点云图
三、下一步工作计划
(一)分析比较各种圆柱度评定算法并编写程序;
(二)将程序整理合并,并将软件硬件相结合编写总程序;
(三)进行程序界面编写,实现图形化控制程序;
(四)整个系统的联调和测量精度分析对比;
(五)撰写论文、准备毕业设计终期答辩。

问题一:关于旋转轴标定,具体的方法和原理是什么?
回答:首先是通过标定的参数将棋盘格内角点映射到相机坐标系中,利用圆弧上任意两点的连线的中垂线必过圆心,构建方程可求出圆心位置;最后用最小二乘法拟合圆心点集,得到旋转轴直线方程参数。
问题二:实验平台被检测零件的大小是否受硬件选型的影响?
回答:相机镜头焦距为25mm,需要手动调节光圈和聚焦,零件在超出相机景深距离范围后会变得模糊,精度将受到影响。受工作范围影响,目前所搭建的测量系统只能测量比较小型的零件。

中期答辩已过,在近四个月的对毕设过程中,我从一开始对结构光一无所知,到现在熟悉线结构光的三维重建原理。途中经历过艰难、迷茫,看不懂文献公式,写出代码经常报错等困难,在不断的学习中,我逐步了解了科研的方法和步骤,为后续的研究生学习打下基础,于我而言也是非常有意义的一段时光。
同时,感谢本次中期答辩老师们的提问与建议,让我对现阶段毕业设计中所存在的问题也有了清楚的认识。接下来我会认真思考毕业设计中所存在的问题,进行改进与完善。感谢王雪梅老师耐心细致的解答,在每次与王雪梅导师的沟通与交流中,我对于自己研究的内容都有了更深一层的理解,使我不断解决遇到的困难。

