学生姓名:李杰
班 级:机械五班
指导教师:王小强
毕设题目:基于图像定位的柔性单元上下料的系统设计


一、概况
1.选题意义
随着现代制造业向智能制造方向的发展及不断的升级换代,多工位、多设备的柔性生产线应用越来越广泛。高速度、高质量、自动化、柔性化方面对手工操作、人工送料等传统方式形成了优势。为满足柔性单元自动、高效的需求,作为柔性单元上下料的机械手作为其核心组成部分也需要更深入研究,才能达到提高生产效率和产品质量的目的。机器视觉、图像定位在柔性加工生产线的进一步研究与发展,对柔性生产线效率与准确性的进一步提升,是图像识别与柔性单元在生产流程的具体应用。
设计一个针对柔性制造单元(预先设定)进行自动上下料的系统,系统主要由加工设备、机器人、轨道、分料台等设备及视觉定位控制系统组成。视觉定位控制系统用于自动识别工件的抓取和放置位置,以提高机器人上下料时对工件类别区分与抓取放置位置定位的要求。柔性单元用于系统自动、高效的上下料,是应用多工位、多设备的必备单元,相较于传统生产方式具有显著的优势。通过本次设计,使学生对自身有关机器视觉知识、机器系统知识以及所学的基础专业知识有了更深的了解和运用,提高了其对知识的应用能力、分析问题和解决问题能力、自主获取所需知识及创新工作能力、沟通能力等。同时,增加了为解决机械工程领域实际问题而进行方案的设计、制造和控制等工程问题的经验,以及对机械工程领域实际问题开展科学研究与分析能力、对现代信息技术工具使用能力的培养;基于机械工程相关背景知识合理分析、评价方案对环境、安全方面的影响;培养增强了自主学习、独立学习、终身学习的意识与能力和以创新和批判性思维解决机械工程实际问题的能力;对机械设计相关的软件SolidWorks、RobotStudio等的操作更加熟悉。
2.任务分解
(1)任务书要求
文献及参考资料要求:
查阅、收集文献,了解研究的现状、方法与相关技术,文献资料不少于30篇,并且种类多样(中文英文文献、书籍、论文、标准、设计规范等等);英文文献翻译,相关外文资料的阅读及翻译,不少于5000单词。
方案设计要求:
设定柔性单元上下料的具体工况、加工工件(至少两类不同工艺)、加工流程等,对系统的总体方案进行设计;选定机械手型号,采用机器视觉,识别不同工件类型,对应工件不同工艺;识别工件在分料台上的不同抓取位置,获取机械手定位坐标。
仿真分析要求:
建立模型,分析机械手运动学规律,得到相应运动路径和运动曲线;设计末端执行器(手爪)的结构形式,达到抓取不同工件的目的;并对其完成工作状态下的静力学分析和动力学特性分析;生成能表现系统工作原理的基本仿真动画。
整体系统要求:
具有自动精确的识别工件的抓取和放置位置,在机器人上下料时完成分料与精确视觉定位的功能;具有高速度、高质量、自动化、柔性化等特点的同时考虑实现其他功能的部分的位置及系统总体布置。
(2)设计过程任务要求
方案设计及设备选定:
确定所加工的工件情况,如尺寸、标准等,以及方案设计所负责的工件加工工序及流程;选定系统柔性单元所采用的机床型号以及生产线上机床的布置;选定系统要选用的机械手型号。
图像识别与视觉定位:
阐述所采用的单目觉定位原理;完成摄像机标定、手眼系统标定;对工件进行图像处理,完成工件位置信息的识别。
机械手选型及手爪设计:
根据选定的工件设计适用于加工工件的机械手手爪具体结构;完成机械系统模型的建立,对机械手的工作状态进行静力、动力学分析;概述机械手系统完成上下料的过程。
控制设计及模型仿真:
简述方案控制系统的设计,及系统工作过程中的控制流程;对所确定的系统模型及选用的控制软件进行结合,完成机械手仿真动画的生成。
二、已完成工作
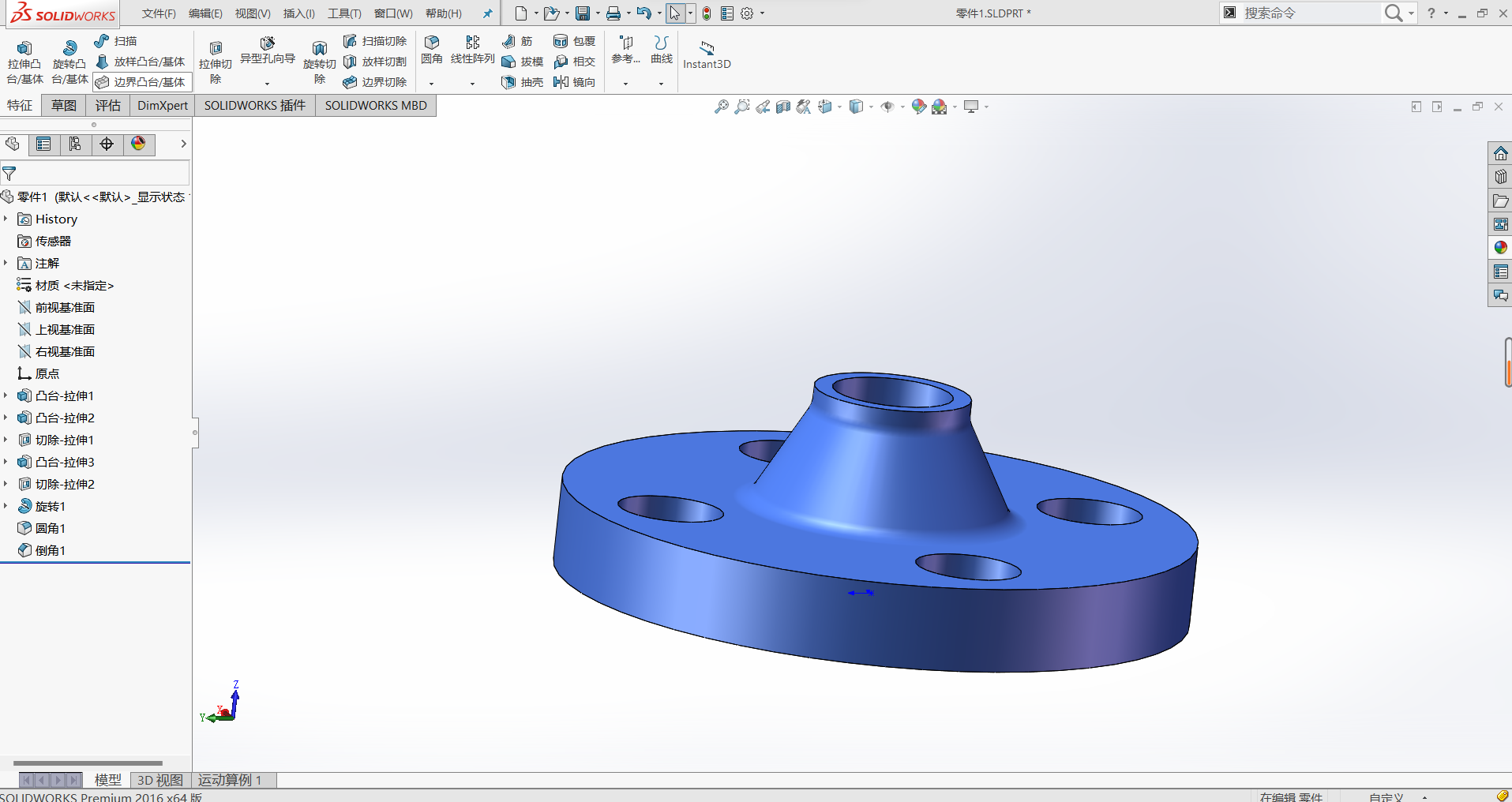
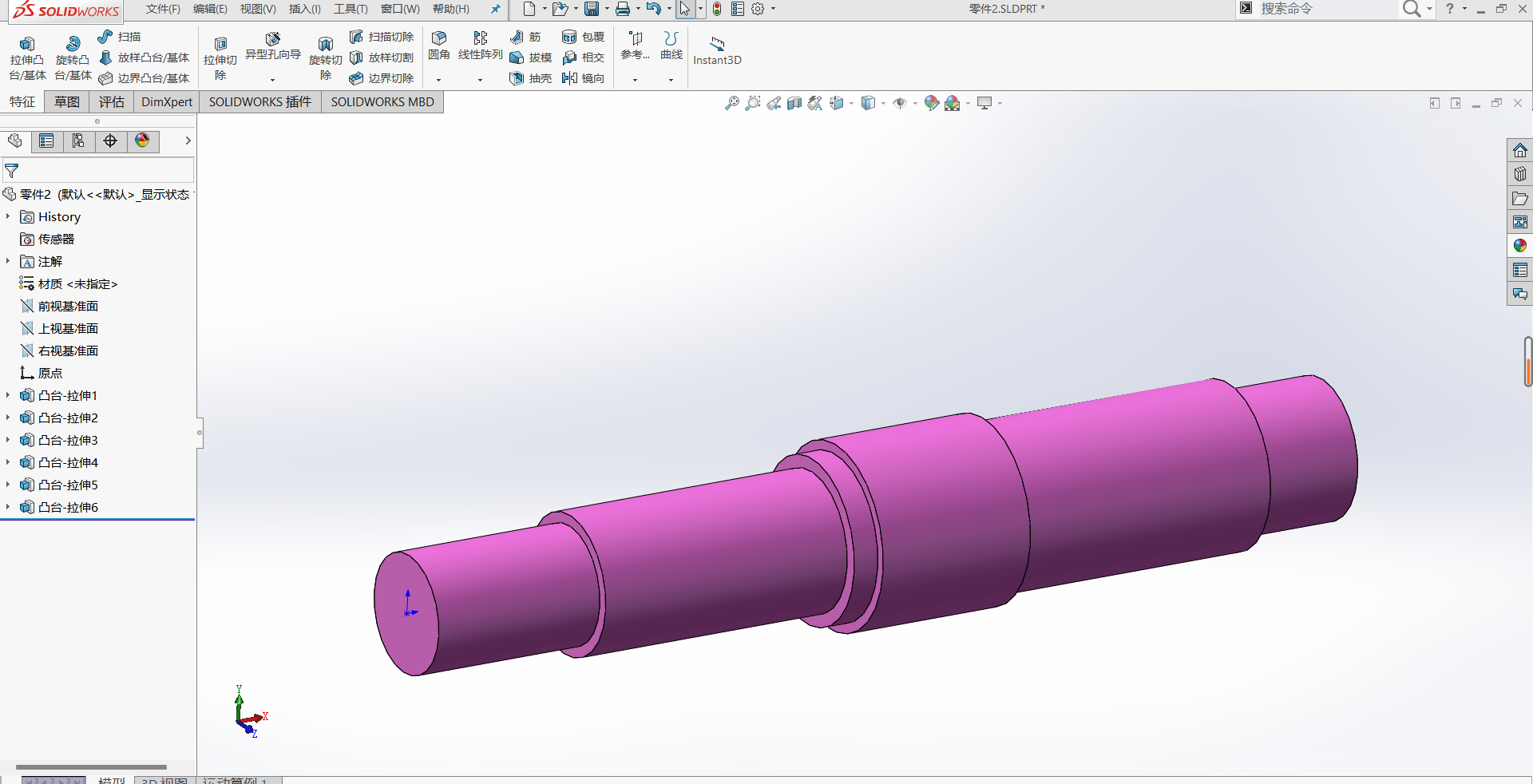
1. 查阅市场上所生产的各种零件及有关零件的标准尺寸,确定了作为加工对象的工件为规定尺寸的法兰盘和齿轮轴。
加工法兰盘建模
加工齿轮轴毛坯建模
2. 根据一般法兰盘和齿轮轴的加工工艺,选定了设计所负责的加工范围,即负责法兰盘和齿轮轴粗加工的部分工序,并由此选定了机床型号和加工生产线的机床布置。
法兰盘所设计部分加工工艺
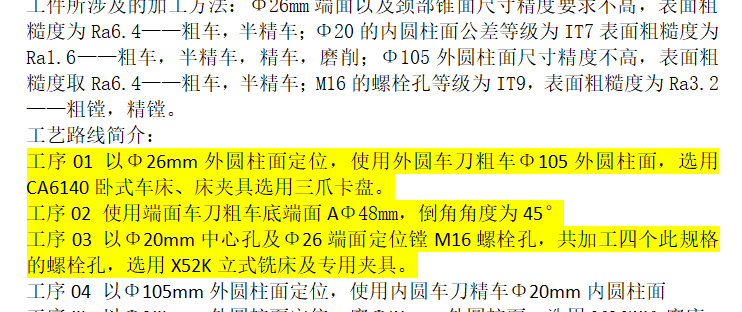
齿轮轴所设计部分加工工艺
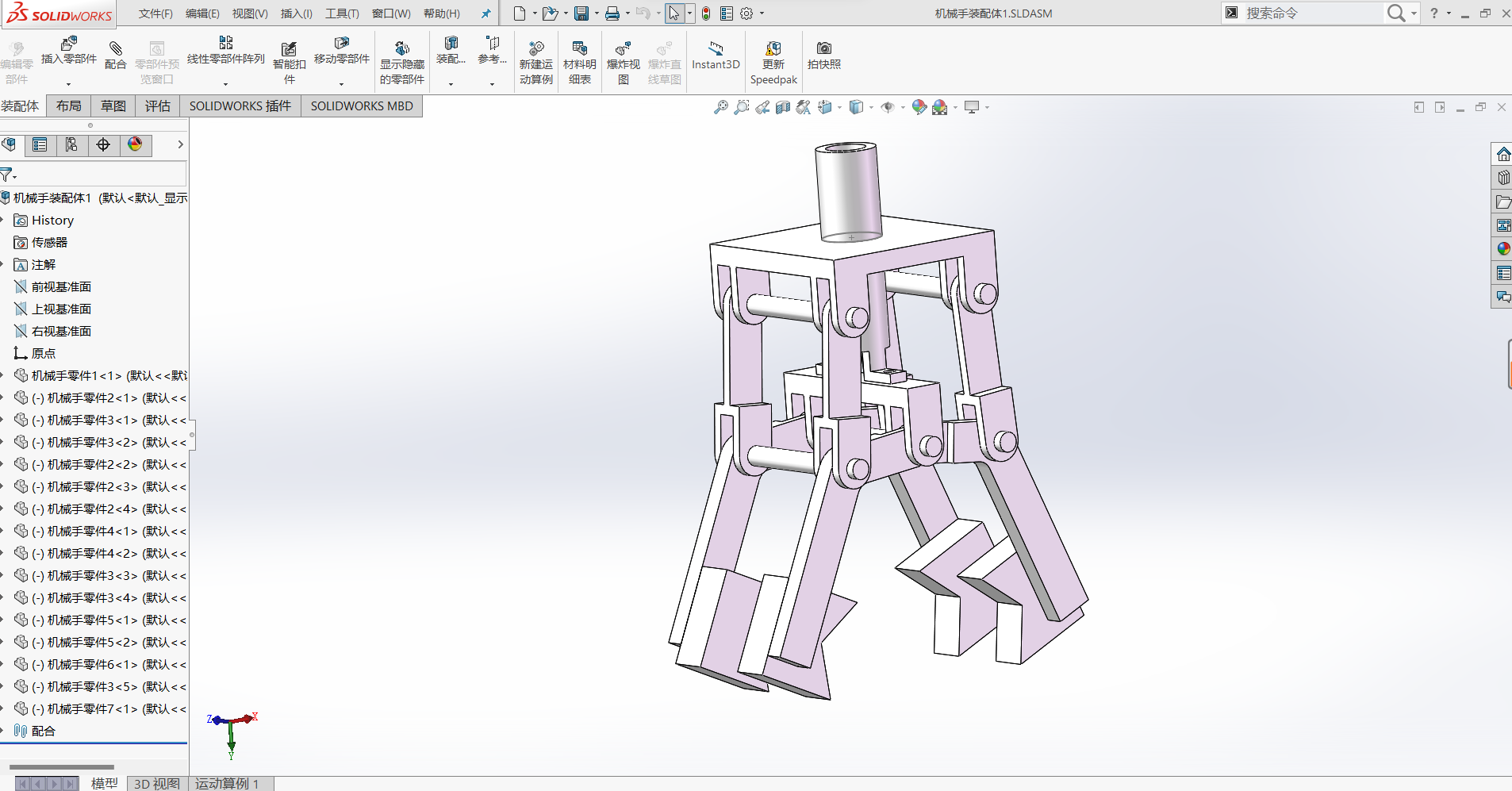
3. 初步完成机器手型号的选择和机械手爪结构的设计,使其能够大体满足工件的夹取要求,平稳夹取工件。
机械手爪初步模型
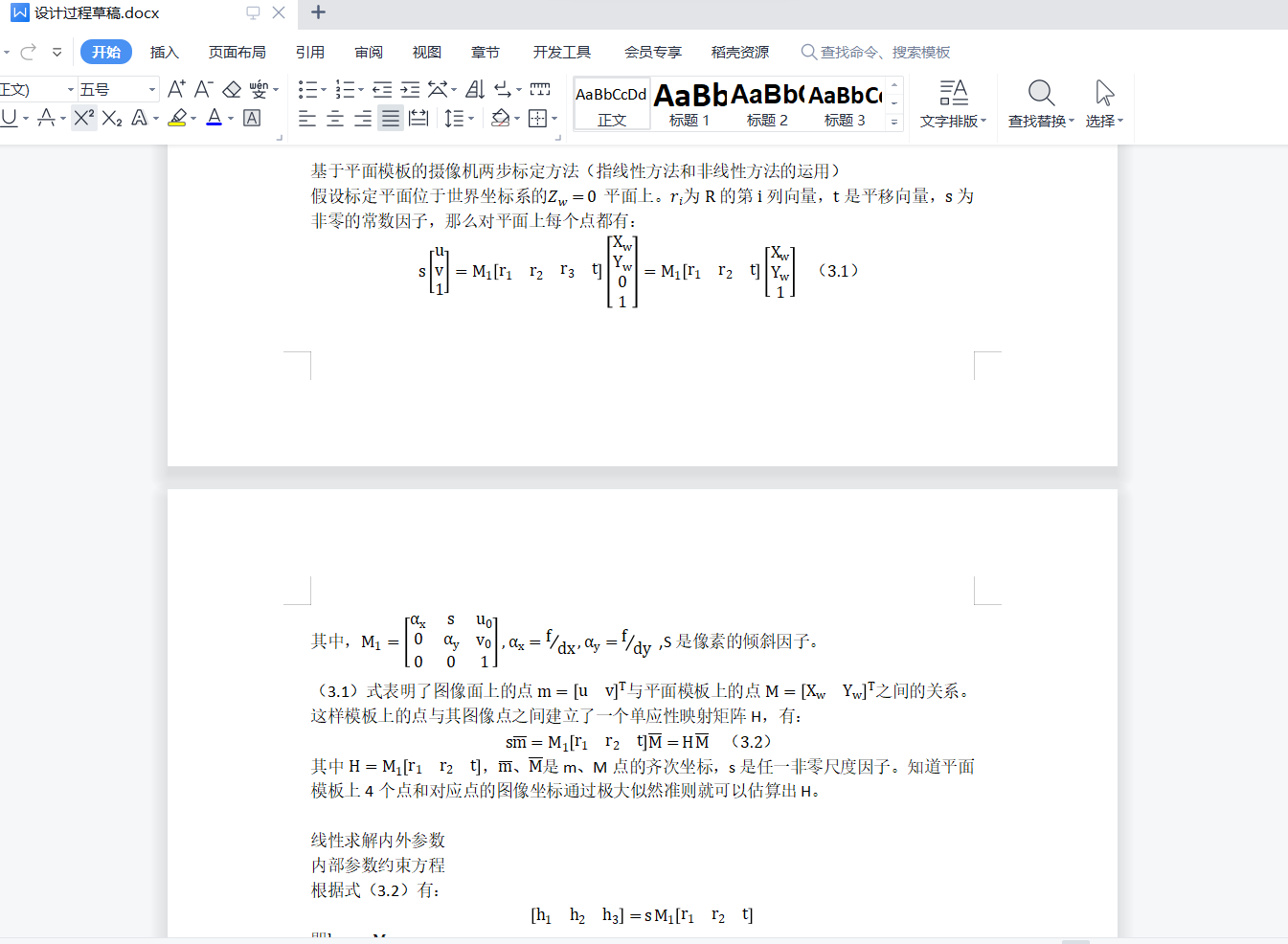
4. 初步完成单目视觉定位算法的标定方法及原理的叙写,并进行了标定结果的初步分析。
三、下一步工作计划
1. 完成图像识别与视觉定位部分:将所得到的标定结果运用到法兰盘和齿轮轴的位置识别中,完成对法兰盘和齿轮轴轴线的识别,得到加工工件的位置信息。
2. 完成机械手爪设计与工作部分:结合工件的装夹过程,最终确定末端手爪的结构并对其完成工作状态下的静力学分析和动力学特性分析;并对机器识别过程的实际误差进行补偿等。
3. 完成控制设计与模型仿真部分:确定所设计柔性单元的上下料控制系统,并对其进行概述和流程的确定,系统工作原理的叙述,并生成机器人系统的仿真动画,完成整体系统硬件与软件的联系和控制情况。
4. 最后完成设计过程资料的整理以及设计说明书的编写。

问题一:如何解决开题答辩时所存在的如何采用单目视觉定位技术运用P3P位姿测量原理解决空间位置的确定的问题?
回答:继续使用单目视觉定位技术完成位置的识别,而对于空间位置的确定采用位移\距离传感器控制机械手Z方向的位移量。
问题二:单目视觉标定采用的是什么方法?
回答:采用的是张正友标定法的原理,使用平面板做标定物,采用基于平面模板的摄像机两步标定法。

通过本次毕业设计目前所完成的工作,对有关机器系统的知识以及以往所学的基础专业知识有了更深的了解,对机器视觉相关知识也有了进一步的学习。提高了自身查找、搜集和分析资料的能力,并能够对其进行一些实际运用。同时,对机械工程领域一些实际问题解决方案的设计、制造和控制等流程的一定了解,培养了对机械工程领域实际问题开展科学研究与分析能力、对现代信息技术工具使用能力。对机械设计相关的软件SolidWorks、RobotStudio等的操作更加熟悉。学习了基于机械工程相关背景知识合理分析、评价方案对环境、安全方面的影响。在设计过程中出现的问题,督促自己要增强自主学习、独立学习的意识与能力,并且要合理分配时间抓紧工作进度才能按时完成工作安排。

