学生姓名:汪世杰
班 级:茅机2018-01班
指导教师:郭鹏
毕设题目:基于云边协同与大数据预测的易爆品仓库巡检机器人

一、概况
1.选题意义
目前在火药、化工、食品、服装等易燃易爆品仓库领域,由于设备检修不及时导致的安全问题时有发生,往往会造成严重人力物资损失。易爆品的定期巡检对于维护存储此类货品的仓库的安全至关重要,采用巡检机器人能够实现远程和无人化巡视管理。本研究拟在当前机器人技术与远程通信技术的支撑下,基于数据科学和云边协同思想,建立一套仓库巡检机器人工作系统。
本选题源自于行业界兴起的热点问题,在未来5G技术与大模型方法愈发成熟的趋势下,将会成为未来十年中国智慧制造体系中的工业全面数字化转型与中国新基建战略的重要部分。
2.任务分解
(1)分析国内外对于云边协同技术的研究现况
(2)学习云边协同与巡检机器人的相关技术,掌握基于大数据分析时序信号异常值的方法理论
(3)利用单片机技术搭建起具备自主移动与视觉巡检能力的执行机器人
(4)利用区块链与网络技术建立起云端监控平台,包括数据存储与任务下发功能
(5)利用时序信号检测算法matrixprofile以及LSTM建立周期信号异常值识别与预测的数学模型
(6)基于树莓派建立边缘端温度信息监控装置用于识别设备的温度异常值
(7)基于云边协同思想建立车间巡检及异常状况决策算法框架
(8)针对本文的云边协同框架进行评价与分析结果,提出相应的优化措施
(9)全文总结与展望
二、已完成工作
1.巡检机器人发展进展与不足
为了满足生产力发展的需要,适应性强,数据传输及时,工作状况稳定的巡检机器人相关技术得到了应用。日本在1980出现了早期的巡检机器人Big mouse,它采取轨道式移动方式,只能沿着固定轨迹移动;2006年在加拿大出现了具备计算机后台监控系统的遥控机器人,它能够利用计算机远程采集现场的温度图谱和视频图像。巡检机器人从实验室走向实际的工厂的转折点在2012年前后,人工智能技术在图像识别与自然语言处理领域取得了突破性进展,以神经网络方法为主的深度学习技术把机器人感知能力推向了商业化。随之而来的是机器人设备在工厂车间中的广泛应用以及传统车间向机器人车间的改造浪潮。
以易爆品仓库作为对象,在仓库巡检领域引入云边协同概念构建新一代具备低成本且运维简单、搭载多AI模型的综合决策能力、具备分布式安全数据保护、融合云边端算力支撑与数据分析协同等多种性能的巡检机器人,是新基建国家战略下的重要研究方向。
2.云边协同架构设计
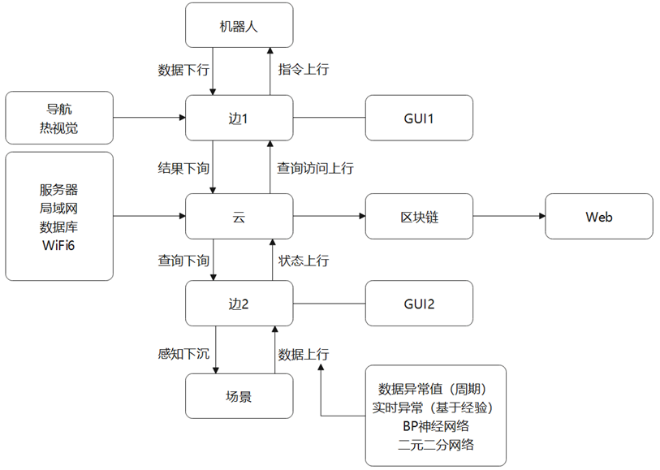

图1 云边架构功能设计
本文设计的仓库巡检系统分为中心云和边缘端两个部分。云上有大量的数据和工作能力,而边缘则仅保留了应对基层应用的决策能力并作为向上层反应现场情况的感知元。最终设计出的云边系统框架是如图所示的三节点系统,通过物理隔离、功能不同、算力不同的三个节点,将整个仓库巡检任务形成分布式网络架构,在实际生产中,如果一个节点发生损坏可以迅速更换其他的备用节点,并且不影响其他节点的功能,而仅仅算在考虑好的技术性延迟以内,极大的保障了系统的容错能力,不至于变成精密的脆弱系统。
3.基于云边协同的巡检机器人设计
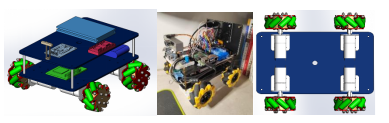
图2 巡检机器人结构
在结构方面,使用solidworks软件对巡检机器人结构和动力学模型进行建模,随后经过动力学分析得出底盘的运动学模型,从而确定底盘的运动方程,再利用电路模块实现机器人的基本运动和电机输出特性调试,得到具备移动能力的机器人。

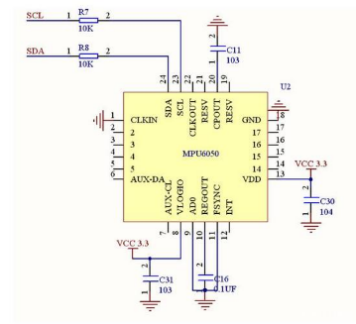
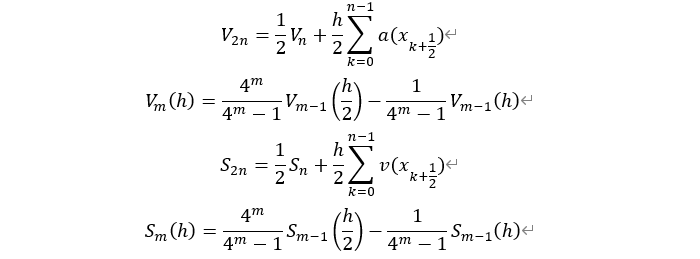
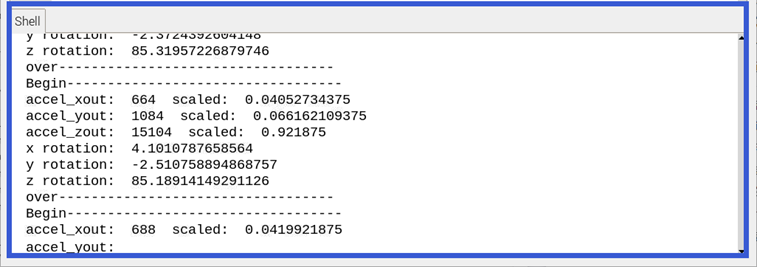
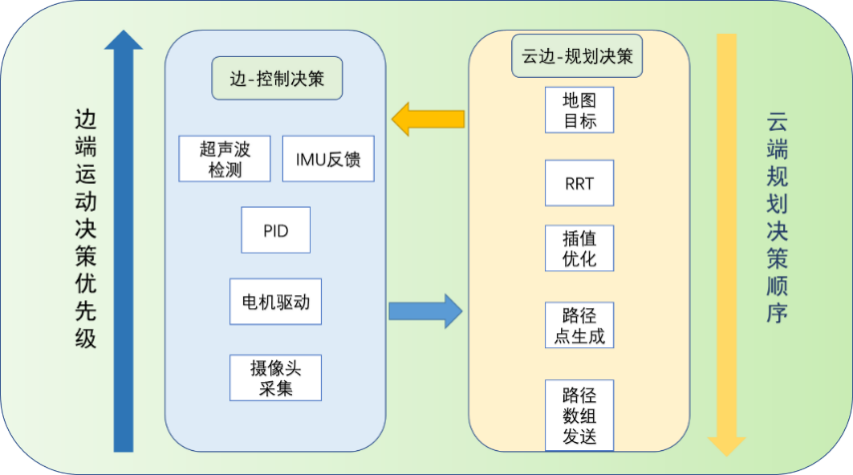
图3 运动决策算法相关内容
在控制方面,利用imu惯性传感器MPU6050和树莓派建立起机器人无参考位移测定方法,通过改进的加速度数值积分方法对imu加速度值进行多次积分分别得到底盘的各个位移分量,从而获取PID控制所需要的系统响应结果,并进一步进行底盘移动控制的开发。再结合云端运行的RRT路径规划算法,最终获得两阶段运动决策方法。
4.基于图像增强的入侵异物云边协同检测算法
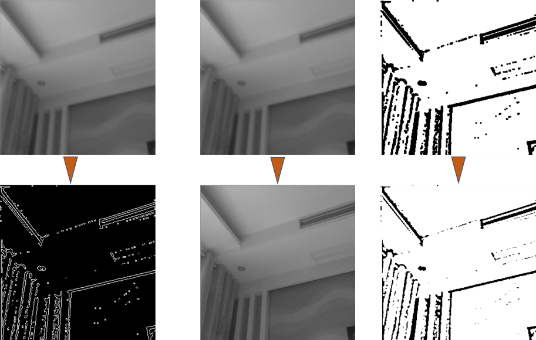
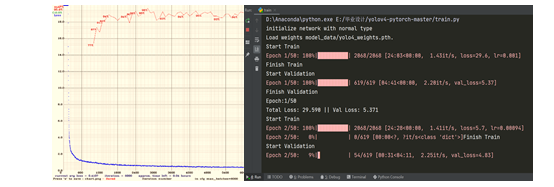
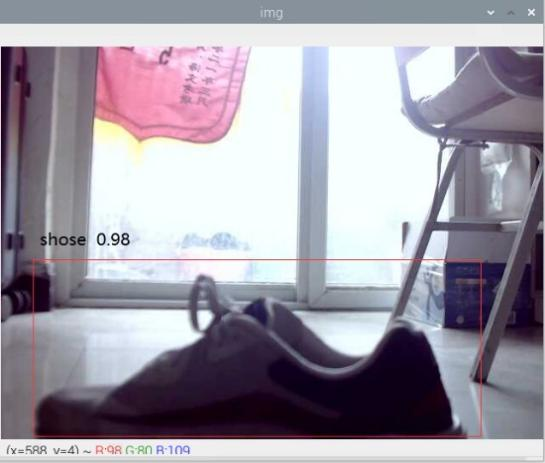
图4 图像增强与目标检测结果
在发生货物倾倒、非法生物入侵、垃圾遗留等情况时,本设计可以在巡检过程中及时发现及时上报云端,通过云端数据库将异常整理出来,交付运维管理部分处理。为了实现这样一种基于视觉的监控能力,本文采用深度学习方法和图像质量增强相结合的方式,设计一种算法以应对仓库道路环境的异物入侵检测。本设计将电脑上训练的目标检测模型部署到计算机上面,将图像增强方法运行在机器人上,通过机器人实时监控道路情况,一旦道路中发生异常,云端就可以迅速生成报警并生成道路异物信息,并存放到车间管理数据库当中。
5.基于深度学习的温湿度边缘预测
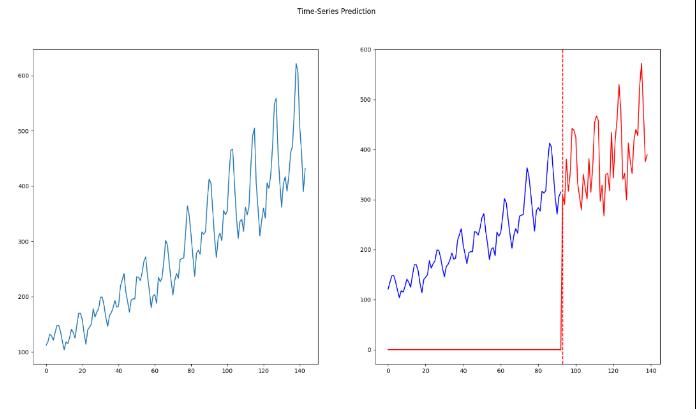
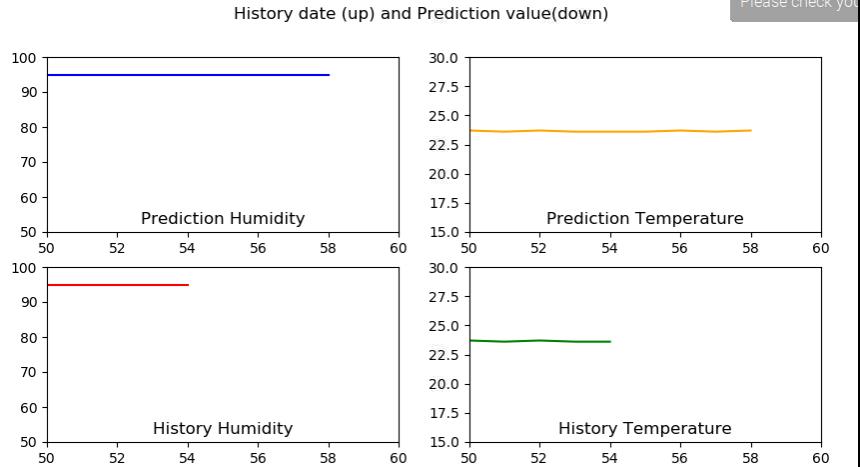
图5 测试集预测结果与实际预测界面演示
结合树莓温湿度计采集的温度和湿度信息,本设计基于LSTM神经网络实现了在树莓派上面利用实时采集的温湿度信息进行预测的功能,如图所示。图分别是预测的温湿度结果和当前的实际读数值。本设计为了预测精度仅仅提前了10s,平均领先3到4个采样点,这意味着在危险情况发生时可以提前10s左右估计到闲情,配合弹药库中的紧急隔断门已经足够使用。
6.基于区块链和时间序列分析的云端数据加密与分析
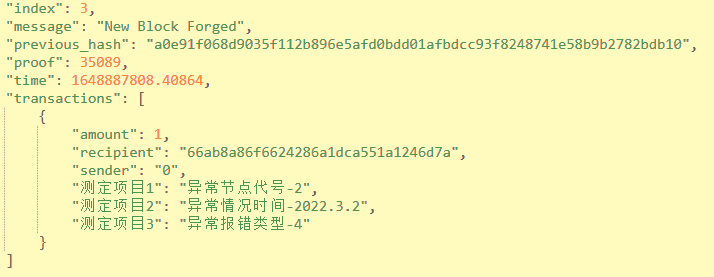
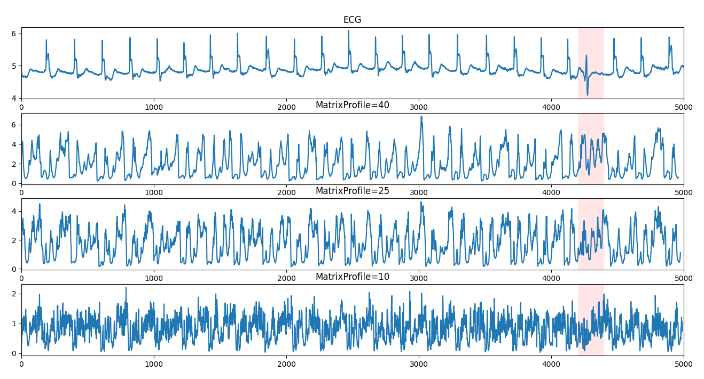

图6 波形诊断与全节点异常数据区块链
本设计在云端上面主要运行的是区块链程序和数据波形诊断程序,其中区块链程序是通过哈希函数和单向链表这两项基本方法建立的测试用链结构,在本设计当中由三个节点,包括云、边1、边2三台设备共同维护,为了更好地展现区块链使用的特点,本设计通过Python的Flask框架建立了一个简单的基于Web的区块链信息存储与查询系统,将传统意义上的本地数据库通过区块链的方式转变成云存储的模式,使得本地数据安全性收到整个云边协同网络的保护。此外为了进一步探索云边协同的应用,本设计在云端上还加入了模型诊断程序,其功能是利用往期温度经验数据分析环境控制系统的异常,使用不同于频谱分析或小波变换的方法,直接在时域当中分析数据好坏。
三、下一步工作计划
1.突出云边协同对大模型方法和低算力设备的适应效果。
2.基于区块链、LSTM、数据诊断,深入挖掘敏感数据分析与安全保障的机制,明确绕开算力浪费和效率低下的缺点下如何将区块链技术与数据分析技术结合起来的机制,着重于探讨云边系统下数据分析与存储模式的新概念,分析其优点与创新之处。
3.调整论文撰写格式,对于无关的或者非核心工作的理论介绍进行删减,着重于创新之处的描述,并且突出在其他研究基础上做出的技术贡献。

问题一:你这个题目里面云边协同是什么意思?
回答:将计算量大、时延大的任务放在云节点上面;将计算量小、时延小的任务放在边缘计算节点上面,从而实现远程算力支持与近场应用延迟的平衡与协调。
问题二:你工作的重点是哪些?
回答:实现基于云边协同机器人远程运动决策的方法;基于云边协同实现分阶段图像增强目标检测方法3、基于区块链实现对云边协同系统本身性能的安全保障。

这一设计经过了长期的技术学习和储备,涉及到很多非机械专业的知识,目的是基于云边协同技术建立起面向弹药库仓储环境的巡检机器人系统,并且使用数据分析方法对环境当中的系统信息进行诊断,分析出异常情况,在云端和边缘端运行不同的功能,将复杂的高延迟的任务通过分工协同转变为低延迟高效能的实现。在这个过程中,我将过去四年的知识和行业发展的新变化融合起来,对机械学科的知识体系有了一个新的认识,旨在突破专业的限制实现跨学科研究模式与前沿技术部署的有机结合,并在这样一个高效新颖且具有挑战性设计过程中收获能力与经验。目前我的工作已经基本结束,后续工作主要是对论文内容的细节性修改并尽可能挖掘其中的学术价值。

