学生姓名:彭越洋
班学生级:机械2017-08班
指导教师:王金栋
毕设题目:空间光学遥感器主支撑结构设计与仿真分析


一、概况
1.选题意义
空间光学遥感技术主要运用在军事侦察、农业普查、环境监测和科学探测等方面。随着对遥感图像质量要求的提高,空间光学遥感器不断向大口径,宽视场方向发展。空间光学遥感器主支撑结构起到对各光学组件和成像焦面的联结和支撑作用,在支撑刚度上需要满足地面装调、测试、试验的重力环境,发射过程的动力学环境以及在轨运行的微重力环境影响。主支撑结构的设计需要满足:结构的静刚度和动刚度需要满足成像的需求;主支撑结构应该具备在恶劣空间环境中工作的能力。本课题对空间光学遥感器主支撑结构进行设计,满足成像光学系统的在复杂环境下的支撑要求。
2.任务分解
(1)查阅相关资料,确定总体任务路线。
(2)主支撑结构设计与建模:包括材料选择,结构形式的选择,建立模型。
(3)有限元模型的建立与分析:建立有限元模型,包括材料属性的定义,网格划分,进行动力学与静力学分析。
(4)是否满足使用要求分析:光学元件的形面精度能否满足要求;结构的动态刚度和静态刚度能否达到使用要求。
(5)结构优化:对不满足要求的指标,对结构改进。
二、已完成工作
1.查阅相关文献,了解了国内外光学遥感器的发展,确定了任务路线,学习了《应用光学》相关知识并完成了文献翻译。

2.完成了主支撑结构的三维建模,确定了主支撑结构各部分采用的材料。
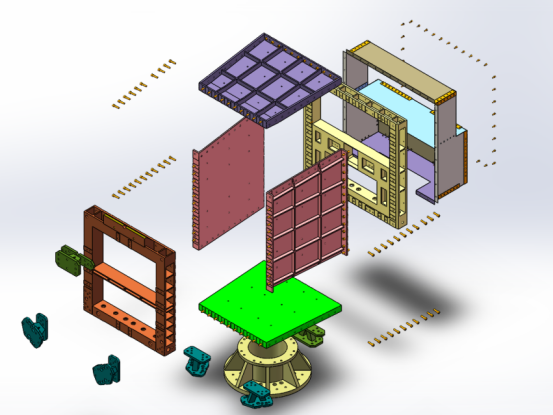
整机结构爆炸图
3.建立有限元分析模型,并完成了整机结构和关键零部件的动力学与静力学仿真分析。
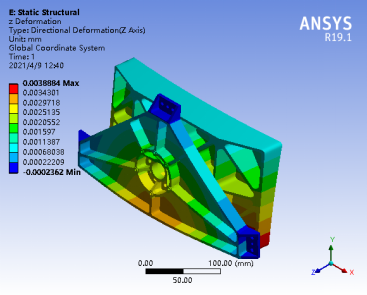
反射镜组件静力学与动力学分析结果
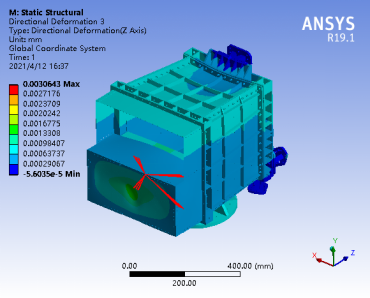
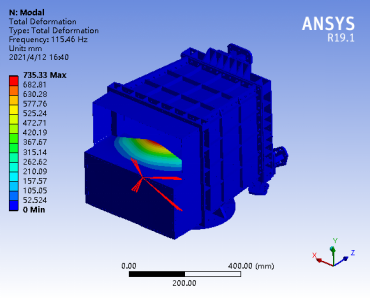
整机静力学与动力学分析结果
4.对结果进行分析,判断关键指标是否能达到要求。对不满足的指标进行改进。
三、下一步工作计划
1.根据反射镜元件以及主支撑结构动力学与静力学仿真结果,验证各部分的强度是否足够,成像质量能否达到要求。
2.对主支撑结构进行谐响应分析和随机振动分析
3.撰写论文

问题一:整机模态中有几个频率比较接近的原因?
回题答:结构相似,连接形式相同,材料相同,都是薄板零件所以模态比较接近。
问题二:整机模态115Hz与卫星平台100Hz比较接近,如果有分析误差可能会发生谐振。
回题答:100Hz是偏于安全的考虑,一般要求大于80Hz,也可以通过补强提高整机频率。

通过前期的工作,完成了本次毕业设计的大部分工作内容。
深入查阅了国内外光学遥感器的发展以及应用场景,了解了光学遥感器主支撑结构设计的要点;学习了《应用光学》相关知识,了解光学评价指标;对空间用精密仪器设计过程,有了一定的了解,并且进行了实践;更加深入的了解了有限元方法的原理并结合软件完成了实际工程项目的分析。
本次毕业设计是在将本专业与光学相结合起来,以实际的航天仪器项目为背景,极大的巩固了本专业知识,并且拓宽了知识面,非常有利于后续研究生阶段的学习。

